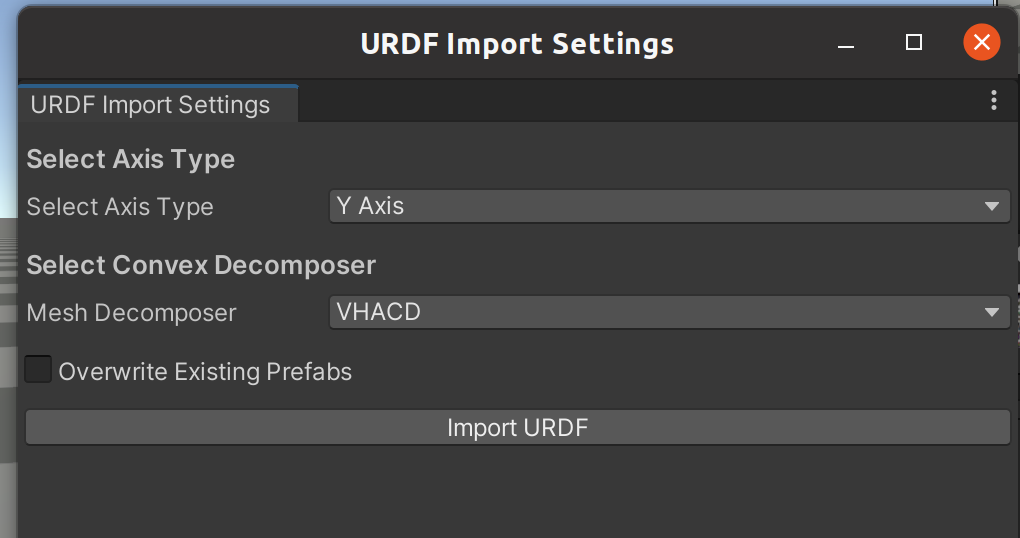
If your robot is not natively available in RCareWorld as a prefab, you need to use the Unity Editor to load it. Refer to URDF Importer for more details. After performing the steps in URDF Importer, you need to remove the scripts add by this add-on.
After clicking ImportURDF Button, you should be able to see a robot in the scene. Click Initialize RCareWorld RobotJoints to remove the redundant scripts generated by URDF importer.

Click GetJointParameters

If the robot does not have gripper on it, you will also need to load the gripper from the corresponding URDF files and attach it to the robot. We demonstrate this step with a robotiq85 gripper in this tutorial.
Load the gripper with URDF importer
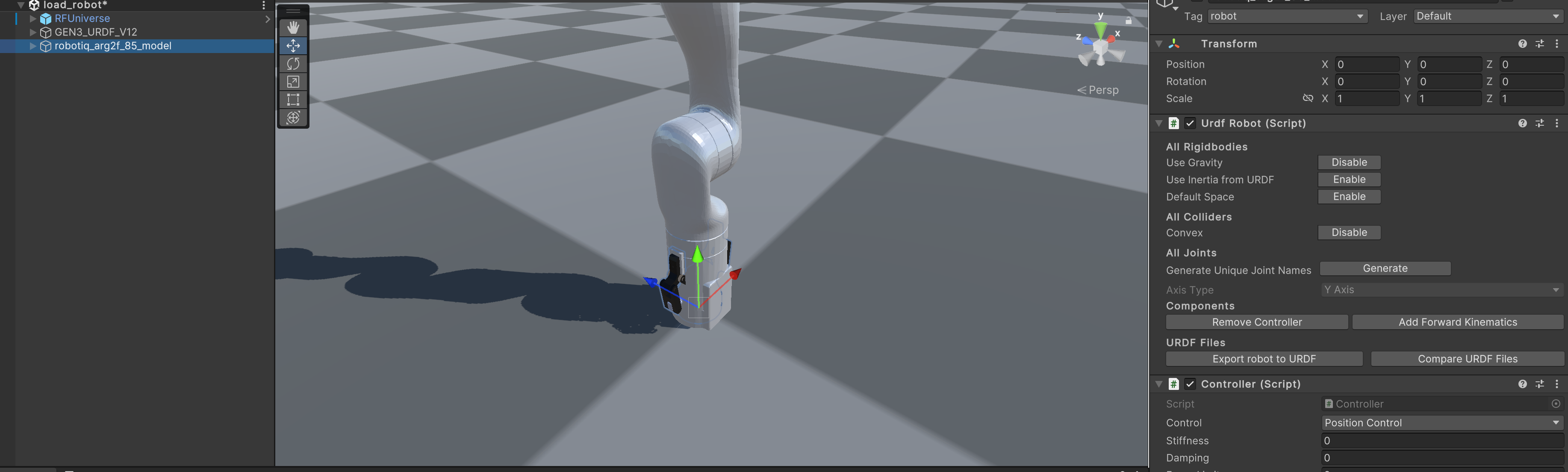
Drag it as the child object of the robot and adjust its position
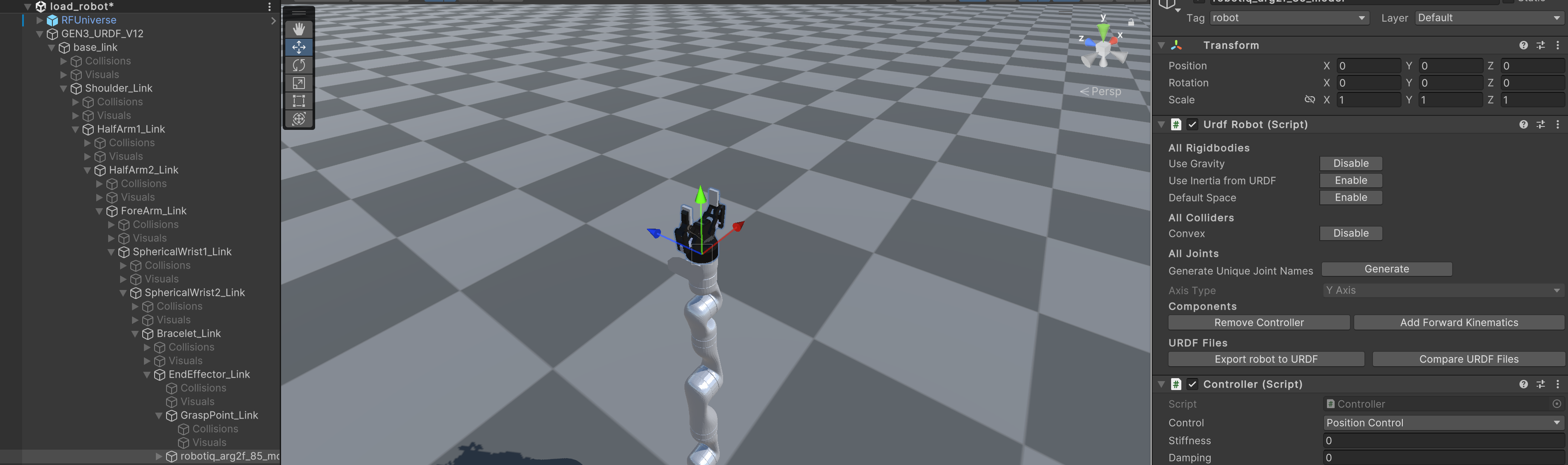
Similarly, click Initialize RCareWorld RobotJoints to remove redundant scripts. Click Get Joint Parameters
Drag the gripper as a child of the robot arm.

The gripper will be assigned an id of int(<robot_id>*10) .